Virtual coordinates, mobile sink and R/C planes
Orange Labs (Grenoble, France) and CITI Laboratory/INRIA (Lyon, France)
10 August 2007
Alpe d’Huez, French Alps
+45° 6′ 30.43″, +6° 4′ 24.46″
 |
 |
Goal
The goals of the experiment were to:
- Deploy a sensor network into a field, together with an unconnected remote base station.
- Mount a sensor onto a R/C plane, which serves as mobile sink.
- Transfer a request from the base station to the mobile sink.
- Transfer this request from the mobile sink to the network.
- Establish a multi-hop communication network among the nodes on the ground using our communication protocols (see bibliography). In-network communication includes flooding the request into the network, and sending the answer to the mobile sink using virtual coordinates.
- Transfer the reply back from the mobile sink to the base station.
Details are below, or you can just skip to the results or watch the pictures and video.
Background
Much effort has been put during the last 5-10 year into Research on Wireless Sensor Networks (WSNs). Numerous conferences, journals and special issues are dedicated to these networks, and new solutions appear on a weekly basis. Despite all this activity, a surprisingly low number of actual deployment examples have been made public. Whereas rolling out a solution can be considered more part of engineering rather than Research, we argue that physical implementation confronts the researcher with important on-field constrained. As solutions for WSNs are cross-layered, and as these solutions are largely impacted by lower layers (e.g. wireless transmission), real world confrontation has a very beneficial impact on Research.
Real-world deployment has been largely simplified by the appearance of commercial products. The most-known MICA wireless sensor nodes have been developed by laboratories at University of California at Berkeley. They were initially commercialized by Crossbow (Mica2 in 2002, Mica2dot in 2003), the latest versions (Tmote SKY in 2004, Tmote Mini) are brought to the market by Moteiv, a spin-off company of the University of California at Berkeley. On-going Research is aiming at developing energy-harvesting nodes which collect data from their environment, radically changing the energy-constrained assumption made for WSNs.
A pioneering team at Berkeley lead the smart dust project, which used the early versions of the Mica2 motes to do proof-of-concept demonstrations. An early experimentation in 2001 involved a autonomous radio-controlled airplane which dropped sensors along a highway to monitor the passing of large military vehicles. The plane continuously passed above each node to collect the measured data, which was then transferred back to a base station.
Our implementation resembles the early implementation done by the Smart Dust team in that we have a mobile sink node, a network and a remote base station. Yet, the key difference is that the mobile sink communicates with a complete WSN and not a series of individual nodes. In this former case, the networking problems were largely simplified as the multi-hop nature of node-to-sink communication was essentially removed. Having a real multi-hop WSN raises interesting problems such as self-organization and real-time communication.
Sensor Node Hardware
We have used the Ember EW2420 platform for all the nodes in the network. These embed a Ember/Chipcon CC2420 radio chip, and a Atmel AtMega128 micro-processor. The board is powered by two AAA/LR6 batteries, and an antenna is attached to it. The development kit is used to program the nodes, and to monitor their behavior using the serial port. This is used for the base station.
|
|
|

Aircraft
The aircraft is a MS2001 with a wingspan of 2.20 meters, powered by a 7.5cc motor, and controlled by a Multiplex radio. It flies at about 25 km/h. During the experiments, we asked the pilots to fly above the network and the base station at an altitude of no more than 5 m.
 |
 |
Deployment

For the network and the base station to be disconnected, they were deployed at the opposite ends of the runway, about 80 m apart. As depicted in the following figure, we used a 16 node network.
Protocol Stack and implementation
The demonstration is performed in rounds, one round corresponding to one round of the airplane. Each round is composed of 6 phases:
- Data Request. The base station sends a request to the mobile sink.
- starting Broadcast Request. The mobile sink when passing above the network sends a broadcast request
- Broadcast Request. This request is flooded inside the network. The node holding the answer identifies itself
- Routing. The answer is routed back to the mobile sink.
- DATA reception by plane. The mobile sink receives the answer.
- DATA retrieval by base station. Upon passing above the base station, the mobile sink sends the answer to it.
The two main goals from a protocol point of view were:
- From a routing point of view, demonstrate the use of virtual coordinates with a mobile sink (read [2] and [3] in the bibliography). This is used only in phase 4.
- From a MAC point of view, demonstrate the energy-efficiency of the 1-hopMAC protocol (read [1] and [4] in the bibliography). This is used throughout all phases.

The nodes were programmed using THINK (THink Is Not a Kernel, think.objectweb.org). The THINK Framework is a C implementation targeting the embedded world of the highly flexible Fractal component model. As THINK is based on components, it is very easy to reuse already existing ones. Thanks to inherent flexibility of THINK, we were able to code the complete protocol stack within 3 weeks. If you click on the following thumbnail, you’ll see how the different components are linked together. Blue and purple boxes represent components we were able to use from-the-shelf.
Results
It worked!
Over the course of the day, just about everything that could go wrong did go wrong, but ultimately we demonstrated everything that we set out to demonstrate.
- 1.00 pm. The 16 nodes composing the network as booted, and deployed into the field.
- The base station is mounted onto a development kit platform, and powered by a 12V car battery. It is place at the opposite side of the runways together with a laptop computer to monitor its activity.
- The functioning of all the protocol steps is verified by walking with the mobile sink from one end of the runway to the other.
- 2.30pm The R/C plane is started, and the mobile sink node is mounted on top of it
- 3.30pm Initial tests show that because of the plane’s trajectory, the mobile sink was never in range of the base station. The base station is moved from the North-East to the North-West corner of the runway. Communication between the plane and the network runs smoothly.
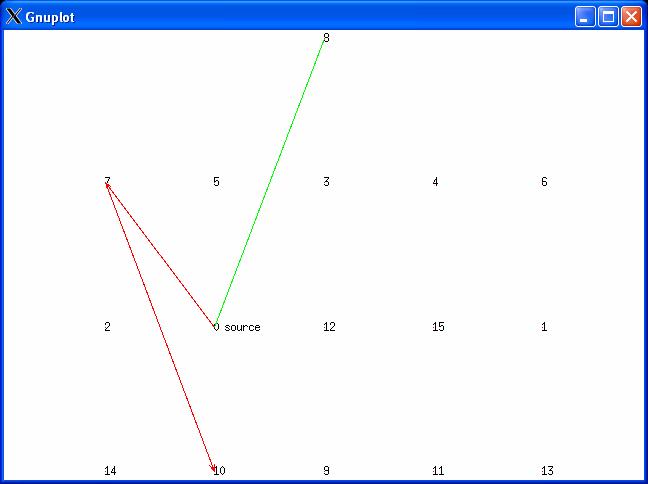
The application layer functions as follows. The base station asks for the list of neighbors of a specific node called source node. This information can be known by recording the senders of the ACK messages within the 1-hopMAC protocol, and does not involve periodic Hello messages of any kind. Once the answer is returned to the base station, it is displayed on the computer connected to it (see screen capture above, green edges). The path taken by the last message from the source node to the mobile sink is also displayed (red arrows). All nodes of the network become source nodes in a round-robin fashion.
Other pictures












Participants
- Thomas Watteyne, leader/communication stack
- Michaël Gauthier, implementation/software/testing
- Julien Gaillard, hardware
- Dominique Barthel, deployment supervisor/photographer
- Loïc Amadu, pilot
- Loris Grasset, pilot
Publications
- T. Watteyne, A. Bachir, M. Dohler, D. Barthel and I. Augé-Blum, 1-hopMAC: An Energy-Efficient MAC Protocol for Avoiding 1-hop Neighborhood Knowledge, International Workshop on Wireless Ad-hoc and Sensor Networks (IWWAN), 2006.
- T. Watteyne, I. Augé-Blum, M. Dohler and D. Barthel, Geographic Forwarding in Wireless Sensor Networks with Loose Position-Awareness, 18th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), 2007.
- T. Watteyne, D. Simplot-Ryl, I. Augé-Blum, M. Dohler, On Using Virtual Coordinates for Routing in the Context of Wireless Sensor Networks, 18th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), 2007.
- T. Watteyne, I. Augé-Blum, M. Dohler, D. Barthel, Reducing Collision Probability in Wireless Sensor Network Backoff-Based Election Mechanisms, IEEE Global Telecommunications Conference (GLOBECOM), 2007.
